
信号的概念
对于 Linux来说,实际信号是软中断,许多重要的程序都需要处理信号。信号,为 Linux 提供了一种处理异步事件的方法。比如,终端用户输入了 ctrl+c 来中断程序,会通过信号机制停止一个程序。
- 信号的名字和编号:
每个信号都有一个名字和编号,这些名字都以“SIG”开头,例如“SIGIO ”、“SIGCHLD”等等。
信号定义在signal.h头文件中,信号名都定义为正整数。
具体的信号名称可以使用kill -l来查看信号的名字以及序号,信号是从1开始编号的,不存在0号信号。kill对于信号0又特殊的应用。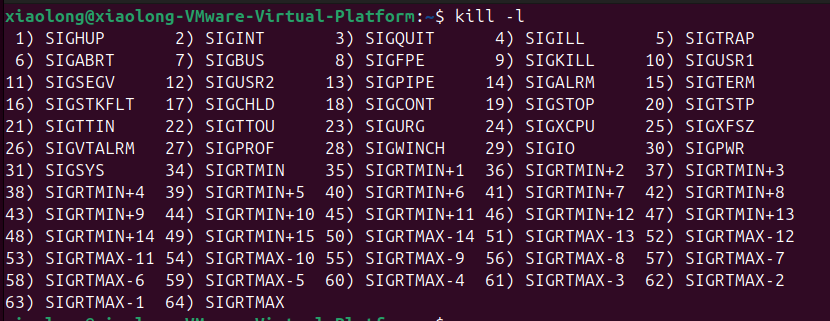
信号的名称 - 信号的处理:
信号的处理有三种方法,分别是:忽略、捕捉和默认动作
- 忽略信号,大多数信号可以使用这个方式来处理,但是有两种信号不能被忽略(分别是
SIGKILL和SIGSTOP)。因为他们向内核和超级用户提供了进程终止和停止的可靠方法,如果忽略了,那么这个进程就变成了没人能管理的的进程,显然是内核设计者不希望看到的场景 - 捕捉信号,需要告诉内核,用户希望如何处理某一种信号,说白了就是写一个信号处理函数,然后将这个函数告诉内核。当该信号产生时,由内核来调用用户自定义的函数,以此来实现某种信号的处理。
- 系统默认动作,对于每个信号来说,系统都对应由默认的处理动作,当发生了该信号,系统会自动执行。不过,对系统来说,大部分的处理方式都比较粗暴,就是直接杀死该进程。
- 具体的信号默认动作可以使用
man 7 signal来查看系统的具体定义。在此,我就不详细展开了,需要查看的,可以自行查看。也可以参考 《UNIX 环境高级编程(第三部)》的 P251——P256中间对于每个信号有详细的说明。
作者:故事狗
链接:https://www.jianshu.com/p/f445bfeea40a
来源:简书
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
函数指针 void (*)(int)
如何声明一个变量来存放这个地址?
现在我们想创建一个变量,这个变量不存储普通的数据(如 int, char),而是专门用来存储某个函数的地址。这种变量就叫做函数指针。
声明一个函数指针变量的语法是模仿函数声明来的:
// 1. 先写出一个普通的函数原型:
void my_handler(int sig_number);
// 2. 将函数名 `my_handler` 替换为用括号包裹的指针变量名 `(*variable_name)`
void (*variable_name)(int sig_number);
// 3. 参数名可以省略,只保留类型,这就得到了标准的函数指针变量声明:
void (*variable_name)(int);解读这个声明:
void: 表示这个指针指向的函数返回 void。(*variable_name):*表示这是一个指针。variable_name是指针变量的名字。括号是必须的,否则void *variable_name(int);就变成了一个返回void*类型的函数声明。(int): 表示这个指针指向的函数接受一个 int 类型的参数。
所以,void (*)(int) 就是这个函数指针变量的类型。 它描述了一类函数:“所有返回值为void且接受一个int参数的函数”。
atoi函数
用来将字符串转为整数
函数原型
#include <stdlib.h>
int atoi(const char *str);//指针参数:
str:指向要转换的以空字符终止的字符串的指针。
返回值:- 成功时返回转换后的整数值。
- 如果无法执行有效转换,则返回
0。
功能描述
atoi 函数解析字符串,按照以下步骤进行转换:
- 跳过前导空白字符:忽略所有空格字符(空格、制表符等),直到找到第一个非空白字符。
- 处理可选符号:识别可选的正号 (
+) 或负号 (-)。 - 转换数字字符:将后续的数字字符(
0-9)转换为对应的整数值。 - 遇到非数字停止:在遇到任何非数字字符时停止转换。
- 返回结果:返回已转换的整数值。
signal函数 信号注册 (入门级)
忽略、捕捉和默认动作的信号
原型
#include <signal.h>
void (*signal(int signum, void (*handler)(int)))(int);这个原型看起来非常复杂,我们可以分步理解:
signum:要处理的信号编号(如SIGINT,SIGTERM)。handler:是一个函数指针,指向你自定义的信号处理函数。这个自定义函数接受一个int类型的参数(信号编号)并且返回void。 你也可以使用两个特殊的宏来代替函数指针:SIG_IGN:忽略该信号。SIG_DFL:恢复对该信号的默认处理方式。SIGINT:中断信号(通常由 Ctrl+C 产生)SIGTERM:终止信号SIGSEGV:段错误信号(无效内存访问)SIGKILL:强制终止信号(不能被捕获或忽略)SIGALRM:定时器信号- 等等(完整列表参见 signal.h)
- 返回值:
signal函数返回一个类型为void (*)(int)的函数指针,即上一次为这个信号设置的信号处理函数的地址。如果设置失败,则返回SIG_ERR。
注意函数指针
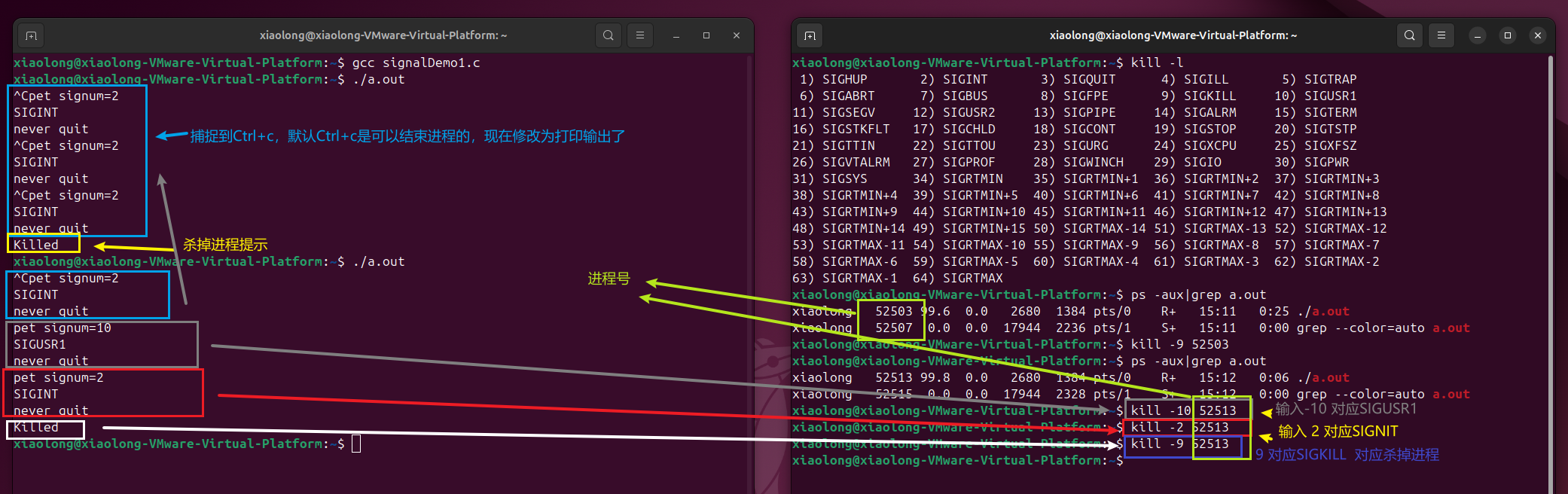
键盘按下Ctrl+c 没办法停止 Ctrl+c的信号为 SIGINT
#include <signal.h>//signal头文件
typedef void (*sighandler_t)(int);//函数指针,返回值为void,*sighandler_t是指针变量名,int是参数
sighandler_t signal(int signum, sighandler_t handler);//返回值为sighandler_t类型,signum 信号(需要捕捉的信号),sighandler_t handler 函数指针代码
include <stdio.h>
#include <signal.h>
//typedef void (*sighandler_t)(int);//函数指针,返回值为void,*sighandler_t是指针变量名,int是参数
// sighandler_t signal(int signum, sighandler_t handler);//返回值为sighandler_t类型,signum 信号(需要捕捉的信号),sighandler_t handler 函数指针
void handler(int signum)
{
printf("pet signum=%d\n",signum);
switch(signum)
{
case 2:
printf("SIGINT\n");
break;
case 9:
printf("SIGKILL\n");
break;
case 10:
printf("SIGUSR1\n");
break;
}
printf("never quit\n");
}
int main()
{
signal(SIGINT,handler);//SIGINT信号,收到SIGINT信号,通过handler函数指针来进行switch判断SIGINT信号的标识符来进行使用
signal(SIGKILL,handler);
signal(SIGUSR1,handler);
while(1);
return 0;
}
常用信号
| 编号 | 信号名称 | 默认行为 | 注释 |
|---|---|---|---|
| 1 | SIGHUP | Term | 挂起信号。终端连接断开时发送,也用于通知守护进程重新加载配置。 |
| 2 | SIGINT | Term | 中断信号。用户按下 Ctrl+C 时产生,请求交互式进程终止。 |
| 3 | SIGQUIT | Core | 退出信号。用户按下 Ctrl+\ 时产生,请求终止并生成核心转储。 |
| 4 | SIGILL | Core | 非法指令信号。进程尝试执行非法、格式错误或特权指令时发送。 |
| 5 | SIGTRAP | Core | 陷阱信号。由断点指令或其他陷阱指令触发,主要用于调试。 |
| 6 | SIGABRT | Core | 中止信号。由 abort() 函数产生,表示程序检测到错误并主动调用中止。 |
| 7 | SIGBUS | Core | 总线错误信号。发生内存访问错误时产生,如访问未对齐的内存地址。 |
| 8 | SIGFPE | Core | 算术异常信号。发生致命的算术运算错误时产生,如除以零或溢出。 |
| 9 | SIGKILL | Term | 强制终止信号。无法被捕获、阻塞或忽略。立即无条件终止进程。 |
| 10 | SIGUSR1 | Term | 用户自定义信号 1。无默认含义,留给应用程序自定义使用。 |
| 11 | SIGSEGV | Core | 段错误信号。进程尝试访问未分配或无权访问的内存时产生。 |
| 12 | SIGUSR2 | Term | 用户自定义信号 2。无默认含义,留给应用程序自定义使用。 |
| 13 | SIGPIPE | Term | 管道破裂信号。进程向没有读者的管道写入数据时产生。 |
| 14 | SIGALRM | Term | 定时器信号。由 alarm() 或 setitimer() 设置的定时器超时时产生。 |
| 15 | SIGTERM | Term | 终止信号。优雅的终止请求,允许进程进行清理工作。kill 命令的默认信号。 |
| 16 | SIGSTKFLT | Term | 协处理器栈错误。用于数学协处理器栈故障(现已较少使用)。 |
| 17 | SIGCHLD | Ign | 子进程状态改变信号。子进程停止、终止或恢复时发送给父进程。 |
| 18 | SIGCONT | Cont | 继续执行信号。让一个停止的进程继续运行。无法被忽略或阻塞。 |
| 19 | SIGSTOP | Stop | 停止信号。无法被捕获、阻塞或忽略。用于暂停进程的执行。 |
| 20 | SIGTSTP | Stop | 终端停止信号。用户按下 Ctrl+Z 时产生,请求在终端中暂停进程。 |
| 21 | SIGTTIN | Stop | 后台进程读终端信号。后台进程尝试从终端读取时产生。 |
| 22 | SIGTTOU | Stop | 后台进程写终端信号。后台进程尝试向终端写入时产生。 |
| 23 | SIGURG | Ign | 紧急数据信号。当套接字上收到带外数据(OOB)时产生。 |
| 24 | SIGXCPU | Core | CPU 时间超限信号。进程超过其软 CPU 时间限制时产生。 |
| 25 | SIGXFSZ | Core | 文件大小超限信号。进程尝试扩大文件超过其软限制时产生。 |
| 26 | SIGVTALRM | Term | 虚拟定时器信号。由 setitimer(ITIMER_VIRTUAL, ...) 设置的定时器超时时产生。 |
| 27 | SIGPROF | Term | 性能分析定时器信号。由 setitimer(ITIMER_PROF, ...) 设置的定时器超时时产生。 |
| 28 | SIGWINCH | Ign | 窗口大小改变信号。终端窗口大小发生变化时发送给前台进程组。 |
| 29 | SIGIO | Term | 异步 I/O 信号。文件描述符上可进行异步 I/O 操作时产生(也称为 SIGPOLL)。 |
| 30 | SIGPWR | Term | 电源故障信号。系统检测到电源故障时发送。 |
| 31 | SIGSYS | Core | 系统调用错误信号。进程执行了无效的系统调用时产生。 |
| 32 | SIG32 | – | 保留信号。线程库内部使用。 |
| 33 | SIG33 | – | 保留信号。线程库内部使用。 |
| 34 | SIGRTMIN | Term | 实时信号最小值。实时信号范围内的第一个信号。 |
kill函数 发送信号(入门级)
kill 函数是用于向一个或多个进程发送信号的系统调用。它不仅是命令行工具(/bin/kill)的基础,也是程序内部进行进程间通信和管理的重要机制。
函数原型
#include <sys/types.h>
#include <signal.h>
int kill(pid_t pid, int sig);参数解析
pid:目标进程的进程ID。这个参数不仅可以是单个PID,还可以是一些特殊值,用于指定一组进程:
pid 值 | 含义 |
|---|---|
> 0 | 将信号 sig 发送给进程ID为 pid 的特定进程。 |
0 | 将信号 sig 发送给当前进程所在进程组的所有进程。 |
-1 | 将信号 sig 发送给当前进程有权限发送的所有进程(除了 init (pid 1) 和自身)。注意: 所有进程通常指当前用户的所有进程,但权限规则适用。 |
< -1 | 将信号 sig 发送给进程组ID为 -pid 的所有进程。例如,pid = -1234 会发送给进程组 PGID 1234 的所有成员。 |
sig:要发送的信号编号。例如:SIGTERM(15):请求进程优雅终止(默认信号)。SIGKILL(9):强制杀死进程。SIGINT(2):模拟按下Ctrl+C。SIGHUP(1):通常用于通知守护进程重新加载配置。0:一个特殊值。它并不发送任何信号,而是用于检查目标进程(或进程组)是否存在,以及当前进程是否有权限向它发送信号。
返回值
- 成功:返回
0。 - 失败:返回
-1,并设置全局变量errno以指示错误原因。
常见错误原因 (errno)
| 错误代码 (errno) | 含义 | 可能情况 |
|---|---|---|
| EINVAL | 无效的信号编号 | 尝试发送一个不存在的信号(如 kill(1234, 100))。 |
| EPERM | 权限不足 | 当前进程没有权限向目标进程发送信号。普通用户无法向 root 用户的进程发送信号。 |
| ESRCH | 目标进程或进程组不存在 | 指定的 pid 找不到对应的进程。进程可能已经终止。 |
| EPERM | 无法向进程组发送信号(某些系统对 pid < -1 的限制) | 在一些系统上,向整个进程组发送信号可 |
int main(int argc, char *argv[])
在C/C++程序中,当使用 int main(int argc, char *argv[]) 签名时:
1. argc 的含义
argc表示命令行参数的总数量- 这个数量总是至少为 1,因为即使没有任何额外参数,程序名称本身也算作一个参数
2.argv[0]的含义 argv[0]总是包含程序名称或路径- 这是操作系统传递给程序的第一个参数
- 对应关系总结
argc是操作系统传递给程序的信息,告诉程序”你被调用时收到了多少个参数”,你只需要读取这个信息即可。
| 参数位置 | 内容 | 与 argc 的关系 |
|---|---|---|
argv[0] | 程序名称/路径 | 总是存在,argc ≥ 1 |
argv[1] | 第一个实际参数 | 存在当 argc ≥ 2 |
argv[2] | 第二个实际参数 | 存在当 argc ≥ 3 |
| … | … | … |
argv[argc-1] | 最后一个参数 | 最后一个有效参数 |
argv[argc] | 总是 NULL | 数组结束标志 |
示例说明
假设我们有一个编译后的程序名为 myapp,以下是一些命令行调用示例及其对应的 argc 和 argv 值:
示例 1: 带一个参数
./myapp helloargc = 2argv[0] = "./myapp"argv[1] = "hello"argv[2] = NULL
示例 2: 带多个参数
./myapp -f input.txt output.txtargc = 4argv[0] = "./myapp"argv[1] = "-f"argv[2] = "input.txt"argv[3] = "output.txt"argv[4] = NULL
实际代码验证
#include <stdio.h>
int main(int argc, char *argv[]) {
printf("Total arguments (argc): %d\n", argc);
for (int i = 0; i < argc; i++) {
printf("argv[%d] = %s\n", i, argv[i]);
}
return 0;
}编译并运行:
gcc -o test test.c
./test one two three输出将会是:
Total arguments (argc): 4
argv[0] = ./test
argv[1] = one
argv[2] = two
argv[3] = threeargc的作用是计算有几个参数的,用户不能给他赋值
用代码程序发送信号
#include <stdio.h>
#include <signal.h>
#include <stdlib.h>
int main(int argc, char **argv)//参数输入
{
int signum;//存储信号标识符的变量
int pid;//线程的id号
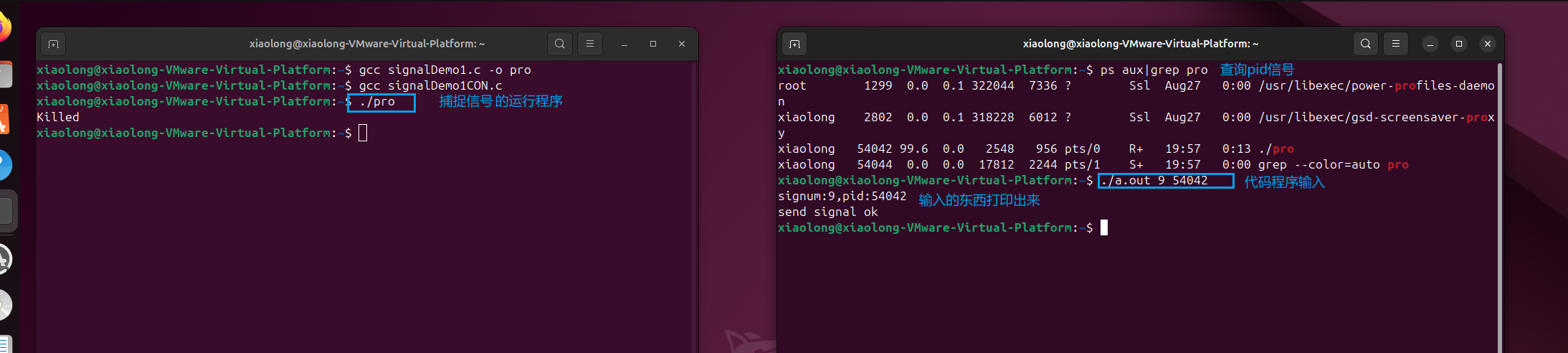
signum = atoi(argv[1]);//通过atoi将字符串转为整型
pid = atoi(argv[2]);
printf("signum:%d,pid:%d\n",signum,pid);//打印信号标识符和线程ID
kill(pid,signum);//信号的标识符,线程的ID号
printf("send signal ok\n");//打印
return 0;
}
重点
- main函数的传参
- argc是系统计算输入的个数
- argv数组是输入的内容
- atoi函数->字符串型转为整型
- signal函数 -> 捕捉信号,忽略信号,还有一个默认动作
- kill函数 -> 通过kill函数发送信号
信号如何携带消息(高级)
sigaction函数
sigaction函数原型
#include <signal.h>
int sigaction(int signum, //信号
const struct sigaction *restrict act,//结构体
struct sigaction *restrict oldact);//备份
//和上面一样的
int sigaction(int signum, const struct sigaction *act, struct sigaction *oldact);
struct sigaction {
void (*sa_handler)(int); //信号处理程序,不接受额外数据,SIG_IGN 为忽略,SIG_DFL 为默认动作
void (*sa_sigaction)(int, siginfo_t *, void *); //信号处理程序,能够接受额外数据和sigqueue配合使用
sigset_t sa_mask;//阻塞关键字的信号集,可以再调用捕捉函数之前,把信号添加到信号阻塞字,信号捕捉函数返回之前恢复为原先的值。
int sa_flags;//影响信号的行为SA_SIGINFO表示能够接受数据
};
//回调函数句柄sa_handler、sa_sigaction只能任选其一这个函数的原版帮助信息,可以通过man sigaction来查看。
sigaction 是一个系统调用,根据这个函数原型,我们不难看出,在函数原型中,第一个参数signum应该就是注册的信号的编号;第二个参数act如果不为空说明需要对该信号有新的配置;第三个参数oldact如果不为空,那么可以对之前的信号配置进行备份,以方便之后进行恢复。
在这里额外说一下struct sigaction结构体中的 sa_mask 成员,设置在其的信号集中的信号,会在捕捉函数调用前设置为阻塞,并在捕捉函数返回时恢复默认原有设置。这样的目的是,在调用信号处理函数时,就可以阻塞默写信号了。在信号处理函数被调用时,操作系统会建立新的信号阻塞字,包括正在被递送的信号。因此,可以保证在处理一个给定信号时,如果这个种信号再次发生,那么他会被阻塞到对之前一个信号的处理结束为止。
sigaction 的时效性:当对某一个信号设置了指定的动作的时候,那么,直到再次显式调用 sigaction并改变动作之前都会一直有效。
关于结构体中的 flag 属性的详细配置,在此不做详细的说明了,只说明其中一点。如果设置为 SA_SIGINFO 属性时,说明了信号处理程序带有附加信息,也就是会调用 sa_sigaction 这个函数指针所指向的信号处理函数。否则,系统会默认使用 sa_handler 所指向的信号处理函数。在此,还要特别说明一下,sa_sigaction 和 sa_handler 使用的是同一块内存空间,相当于 union,所以只能设置其中的一个,不能两个都同时设置。
关于void (*sa_sigaction)(int, siginfo_t *, void *);处理函数来说还需要有一些说明。void* 是接收到信号所携带的额外数据;而struct siginfo这个结构体主要适用于记录接收信号的一些相关信息。
```cpp
siginfo_t {
int si_signo; /* Signal number */
int si_errno; /* An errno value */
int si_code; /* Signal code */
int si_trapno; /* Trap number that caused
hardware-generated signal
(unused on most architectures) */
pid_t si_pid; /* Sending process ID */
uid_t si_uid; /* Real user ID of sending process */
int si_status; /* Exit value or signal */
clock_t si_utime; /* User time consumed */
clock_t si_stime; /* System time consumed */
sigval_t si_value; /* Signal value */
int si_int; /* POSIX.1b signal */
void *si_ptr; /* POSIX.1b signal */
int si_overrun; /* Timer overrun count; POSIX.1b timers */
int si_timerid; /* Timer ID; POSIX.1b timers */
void *si_addr; /* Memory location which caused fault */
int si_band; /* Band event */
int si_fd; /* File descriptor */
}其中的成员很多,si_signo 和si_code 是必须实现的两个成员。可以通过这个结构体获取到信号的相关信息。
关于发送过来的数据是存在两个地方的,sigval_t si_value这个成员中有保存了发送过来的信息;同时,在si_int或者si_ptr成员中也保存了对应的数据。
作者:故事狗
链接:https://www.jianshu.com/p/f445bfeea40a
来源:简书
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
SA_SIGINFO标志位的作用
| 特性 | 没有 SA_SIGINFO | 有 SA_SIGINFO |
|---|---|---|
| 处理函数原型 | void func(int) | void func(int, siginfo_t*, void*) |
| 获取发送者PID | 不可能 | 可以 (info->si_pid) |
| 获取发送者UID | 不可能 | 可以 (info->si_uid) |
| 区分信号来源 | 困难 | 可以 (info->si_code) |
| 接收附加数据 | 不可能 | 可以 (info->si_value) |
代码 NiceSigna.c
#include <signal.h>
#include <stdio.h>
//int sigaction(int signum,
// const struct sigaction *_Nullable restrict act,
// struct sigaction *_Nullable restrict oldact);
void handler(int signum, siginfo_t *info, void *context)//act结构体成员的函数
{
printf("get signum %d\n",signum);//打印接收到的信号编号
if(context != NULL)
{
printf("get data=%d\n", info->si_int); // 方式1:通过si_int获取数据
printf("get data=%d\n", info->si_value.sival_int); // 方式2:通过sival_int获取数据
printf("from:%d\n",info->si_pid);//获取发送消息线程的pid号
}
}
int main()
{
struct sigaction act;//创建结构体
printf("pid= %d\n",getpid());//getpid()获取线程pid
act.sa_sigaction = handler;//结构体成员的函数
act.sa_flags = SA_SIGINFO;//SA_SIGINFO标志位的作用看上面表格,加他旧可以用handler函数功能
sigaction(SIGUSR1,&act,NULL);//信号,结构体,不备份
while(1);
return 0;
}union(联合体)
union 是 C 语言中的一种特殊数据类型,它允许在相同的内存位置存储不同的数据类型。联合体(union)与结构体(struct)类似,但有一个关键区别:联合体的所有成员共享同一块内存空间,而结构体的每个成员拥有自己的内存空间。
语法
union union_name {
member_type1 member_name1;
member_type2 member_name2;
// ... 更多成员
};关键特性
- 共享内存:联合体的所有成员共享同一块内存空间
- 大小决定:联合体的大小等于其最大成员的大小
- 一次一值:在任何给定时间,只能有一个成员包含有效值
基本示例
#include <stdio.h>
union Data {
int i;
float f;
char str[20];
};
int main() {
union Data data;
printf("Memory size occupied by data: %zu\n", sizeof(data));
data.i = 10;
printf("data.i : %d\n", data.i);
data.f = 220.5;
printf("data.f : %f\n", data.f);
// 此时 data.i 的值已被覆盖,不再是有效的整数
printf("data.i after assigning float: %d (undefined)\n", data.i);//一次一值:在任何给定时间,只能有一个成员包含有效值
return 0;
}输出可能是:
Memory size occupied by data: 20
data.i : 10
data.f : 220.500000
data.i after assigning float: 1128465408 (undefined)sigqueue 发送函数
原型
#include <signal.h>
int sigqueue(pid_t pid, int sig, const union sigval value);//线程id,信号,联合体
union sigval {//联合体
int sival_int;
void *sival_ptr;
};使用这个函数之前,必须要有几个操作需要完成
- 使用 sigaction 函数安装信号处理程序时,制定了 SA_SIGINFO 的标志。
- sigaction 结构体中的 sa_sigaction 成员提供了信号捕捉函数。如果实现的时 sa_handler 成员,那么将无法获取额外携带的数据。
sigqueue 函数只能把信号发送给单个进程,可以使用 value 参数向信号处理程序传递整数值或者指针值。
sigqueue 函数不但可以发送额外的数据,还可以让信号进行排队(操作系统必须实现了 POSIX.1的实时扩展),对于设置了阻塞的信号,使用 sigqueue 发送多个同一信号,在解除阻塞时,接受者会接收到发送的信号队列中的信号,而不是直接收到一次。
但是,信号不能无限的排队,信号排队的最大值受到SIGQUEUE_MAX的限制,达到最大限制后,sigqueue 会失败,errno 会被设置为 EAGAIN。
作者:故事狗
链接:https://www.jianshu.com/p/f445bfeea40a
来源:简书
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
代码 send.c
#include <stdio.h>
#include <signal.h>
#include <stdlib.h>
#include <unistd.h>
//int sigqueue(pid_t pid, int sig, const union sigval value);
int main(int argc,char **argv)
{
int signum;
int pid;
signum = atoi(argv[1]);//转字符串为整型
pid = atoi(argv[2]);
union sigval value;//联合体
value.sival_int = 100;
sigqueue(pid, signum, value);//接收函数
printf("%d,done\n",getpid());//打印自己pid
printf("argc=%d\n",argc);
return 0;
}
重点
- sigaction的结构体
- SA_SIGINFO标志位要用








